想像在脆弱的人體腔道中,置入細小的內視鏡機器人進行手術或採檢,需要多麼精準與細緻的器械?「觸覺感知導航內視鏡機器人」就像人體的Google Map,幫助醫師以內視鏡進行肺部微創手術時,自動生成肺葉地圖、規劃導航,快速抵達病灶位置、精準下刀,讓病人解除病痛,榮獲2024全球百大科技研發獎。
微創手術具有傷口小、疼痛少、恢復時間短等優點,特別是利用人體口鼻、肛門、陰道等自然腔道的「自然孔道內視鏡手術」,恢復時間更快、痛感更少,且術後不留疤,更是近年來外科手術的一大突破。
內視鏡技術應用廣泛,包括消化內科、婦產科、泌尿外科、直腸外科等。以結構複雜的胸腔器官為例,細軟的支氣管鏡由口鼻進入結構如同樹枝狀的肺部,愈靠近肺葉末稍、孔徑愈小,相當考驗醫師的專業經驗。
「傳統支氣管鏡由醫生手動操作,路徑複雜、視野範圍狹小,稍一不慎就有可能造成出血、感染及氣胸等後果。」工研院機械與機電系統研究所技術副組長吳建佑說明支氣管鏡可能造成的風險。
專利地圖分析 切入微創醫療機器人市場
肺癌常年盤踞國人十大癌症死因之首,加上COVID-19之後,業界對於胸腔科治療更加重視,「我們發現胸腔科微創手術的醫療機器人仍為藍海市場,適合工業機器人技術已發展成熟的臺灣切入,」吳建佑表示。
為了提升胸腔微創手術的安全性與便利性,工研院結合機器手臂、AI自動導航、微型力量感測器、醫機協作等技術,經過4年的研發,開發出「觸覺感知導航內視鏡機器人」。
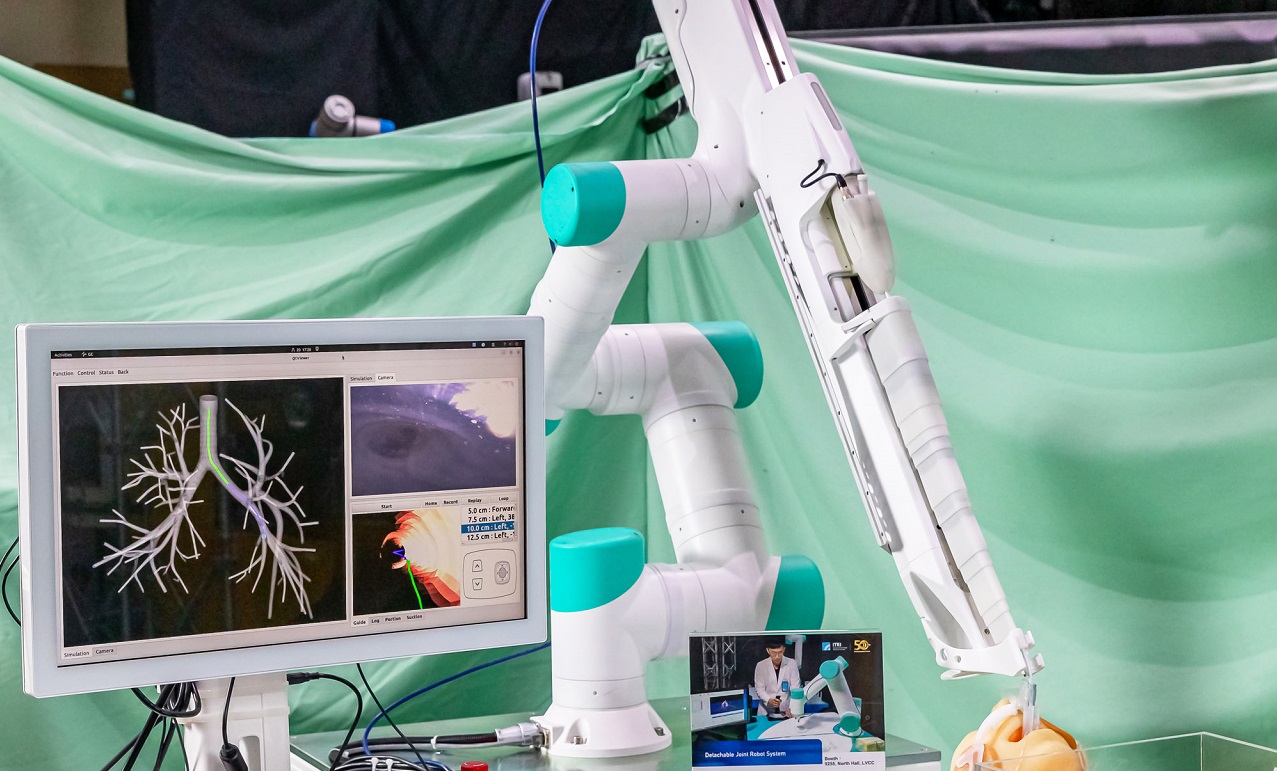
觸覺感知導航內視鏡機器人為搭載於機器手臂上的軟管內視鏡機器人,具備全向性擺動、自動導航與即時觸覺回饋等功能,可感知人體管壁,避免支氣管鏡深入肺葉時過度用力,造成穿刺風險。
過去內視鏡手術全仰賴醫師手動操作,這套技術最大特色,便是整合醫機協作,達到全數位化控制。醫師透過系統面板,便可準確控制內視鏡在人體前進、後退及轉彎的路徑與角度。若要針對病灶進行穿刺、消融或組織採樣,也可以透過系統精準施力。
自動導航功能分為半自動與全自動,可記憶醫師逐節深入病患肺葉的路徑,進行路徑規劃,解決過往目視操作的視野阻礙,以及體內迷航等問題。並結合肺支氣管3D自動建模功能,若在術前進行胸腔造影,也可以自動生成建議路徑,提供醫師手術參考。
此外,過去醫師需要站在病床旁,一邊操作內視鏡,一邊照X光確認位置。採用本技術,醫師只要站在系統面板前即可操控,降低醫師大量曝露輻射環境的危險性。

醫療機器人升級具快換模組設計
經過不斷精進改良,工研院進一步推出性能更加升級的觸覺感知導航內視鏡機器人,突破傳統支氣管鏡兩向控制,達到四向控制、全向性210度擺動,讓醫師在操作時更加便捷準確。
但醫療機器人尺度精細,團隊在開發過程中遭遇不少挑戰。吳建佑分享,醫療機器人的支氣管鏡外直徑最寬僅有4.3公厘,過去工研院主要研發工業型機器人,一下子要從大尺寸轉為小尺寸機器人的開發,著實讓他們頭痛不已。
傳統支氣管鏡的軟骨構造採鉚接方式,生產成本、組裝難度皆高,團隊因此改變思維,以雷射雕刻的方式切割醫療用鐵管,打造出一體成型的蛇骨管材,順利克服困難。
此外,這項技術升級後最大的特色,便是快換模組的設計。有別於第一代機器人需要工具拆卸,觸覺感知導航內視鏡機器人可手動快速拆換,並適應多科別模組,達到隨插即用的功效,不僅提升手術的精準度與效率,也能減少消毒滅菌程序的耗時以及器材感染風險。
國產醫療機器人進軍智慧醫療藍海
觸覺感知導航內視鏡機器人目前已經通過離體及活體動物試驗,並取得30件發明專利、7篇國際論文及6項安規認證,具備產業化的潛力。在研發同時,工研院也整合臺灣內視鏡產業鏈,輔導其在技術、法規方面升級精進,「機器人的所有零件全都由臺灣廠商生產組裝,可望結合醫療技術,打造全方位的微創醫療解決方案,輸出國外。」吳建佑自信地說。
而雷雕管材的方式也能大幅降低生產成本,吳建佑解釋,產業化之後,可針對不同科別內視鏡研發拋棄式快換模組,擴大機器人應用範圍,帶動臺灣醫療產業整體提升,打造國產高階醫材及系統技術,進軍智慧醫療藍海。
(本文由工業技術與資訊授權轉載)

