從自駕車到無人車,次世代汽車正展現多元化面貌,但要真正達到自駕或自主的水準,還需要融入更為廣泛的感測能力與先進的智慧技術。
工研院鎖定自動駕駛(Automated Vehicles)、車聯網(Connected Vehicles)、電動化(Electri- edVehicles)三大車輛技術發展趨勢,於2017 年臺灣國際車用電子展展出八項車用電子技術,其中工研院結合資訊、通訊、電子、機械等跨領域技術,展出自動駕駛車輛的檢測平台及影像感測技術,提升車輛智慧安全,帶領國內廠商搶攻未來車用電子龐大商機。
針對全球汽車市場,工研院產業經濟與趨勢研究中心(IEK)預估,2023 年全球汽車電子與車聯網產值將達4,511 億美元,較2015 年的2,703 億美元成長1.67 倍,其中,又以車輛主動安全、節能環保相關零組件的成長率最高,平均年增率將超過25%以上。
檢測平台驗證自駕技術
工研院機械與機電系統研究所技術長連豊力表示,自駕車和無人車所需的自動駕駛技術是相同的,現正歷經三個發展進程。連豊力指出,第一階段是自動控制,例如:大部分車輛已經配備的ABS 防鎖死煞車系統與動力方向盤等功能,就是以電腦和機械協助駕駛者直接控制車輛的開端。第二階段則是將以往由駕駛者感知車輛狀態與駕駛環境的方式,轉為以電子元件的方式掌握車輛性能的感測技術,像是今年車電展熱門的胎壓偵測器就是一例。第三階段是根據路況環境來駕駛車輛的決策能力與智慧,也就是如何自主開車的功能,包含:底層功能如方向盤轉角、煞車油門加減速,以及高層功能則有路徑導航、軌跡規劃如變換車道等技術。
面對多元化發展的自動駕駛技術,如何把關成為一大挑戰。工研院致力於打造一個具人工智慧技術的車輛技術系統平台,協助臺灣廠商從中快速量產技術或驗證產品,藉此加快臺灣車用電子供應鏈技術升級的速度。
以其中的檢測平台為例,目的在檢測無人車或自主車在面對各種道路環境之下的車輛運行狀態,驗證過程形同「駕訓班」,透過各種考題來確認車輛有無自動駕駛的能力。連豊力指出,測試平台的目的不僅要瞭解自駕車的能力,還要根據真實情境所建立的影像及道路資料庫來結合虛擬實境、擴增實境等技術,訓練自駕車適應各種路況的能力。
舉例來說,模擬不同環境的失效狀態,確認感測元件的正常運作及提供可信度高的數據。此外,變換車道測試則類似飛機的機師模擬艙,可結合軟體模擬與實車模擬來打造驗證場域,背後數據則來自收集臺灣交通路況所建立的資料庫,不僅可有效縮短驗證時間,更將成為臺灣未來在自駕車發展的強大後盾。

工研院機械與機電系統研究所技術長連豊力表示,工研院將自動駕駛的技術成果整合於現有的電動車,以提供更好的自動控制與速度操控,為國內業者開發專屬的駕駛感知平台,希望藉此為臺灣業者拓展全新的應用模式與商機。(圖片來源:工業技術與資訊)
影像感測提升智慧能力
除了平台以外,工研院在自駕車亦擁有多項關鍵元件技術,像是遠距浮空多屏抬頭顯示器,疊合導航、行車紀錄器及車子的運動,投影於車窗玻璃,透過路況資訊的融合做為導航的依據,最直接的效益就是減少駕駛來回瀏覽遠處的車況和近處的儀表板資訊,所導致的眼睛反覆對焦的疲憊風險,以及低頭觀看行車資訊的分心風險,讓行車更安全。
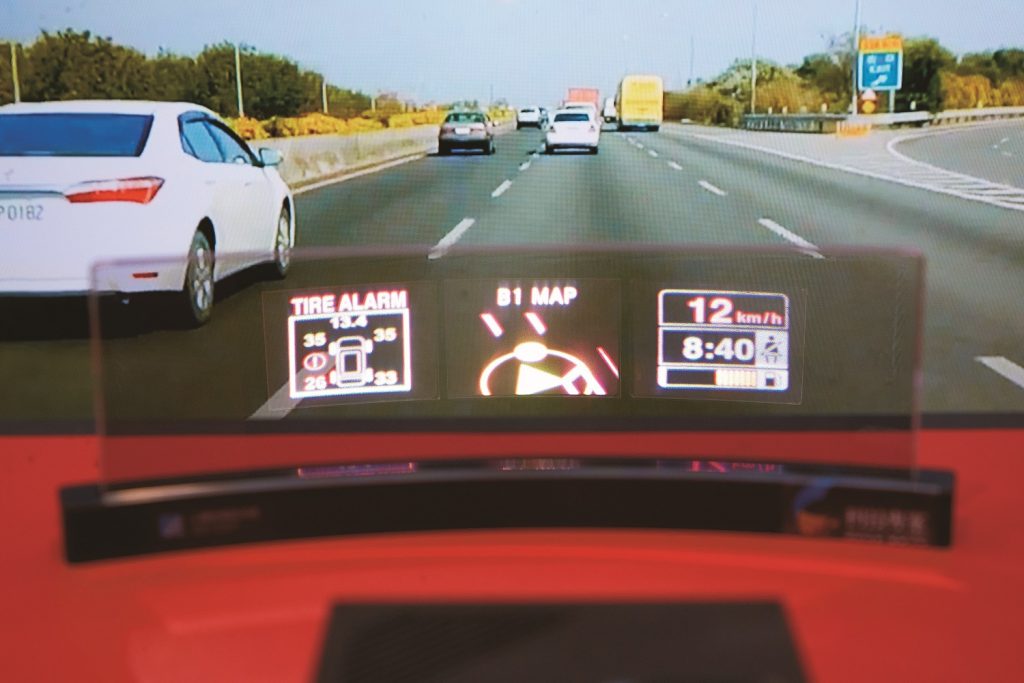
遠距浮空多屏抬頭顯示器是工研院在自駕車的關鍵元件技術之一,疊合導航、行車紀錄器及車子的運動,投影於車窗玻璃,透過路況資訊的融合做為導航的依據,讓行車更安全。(圖片來源:工業技術與資訊)
連豊力表示,隨著讀取電子訊號的技術穩定化,車輛狀態的偵測還有很大的發展空間,過去的焦點都放在車體本身的自主安全如ABS,但未來除了車體本身之外,車與車之間的感測將愈來愈重要。可以預見的是,要迎接自動駕駛、車聯網時代,包括車用影像系統、盲點偵測、車道偏移警示、停車輔助、主動車距控制、緊急煞車輔助等技術都是商機所在。
像是距離偵測的主動感測技術以光學式的雷射、電磁波的雷達為主,被動感測技術則以攝影機為熱門產品。例如:影像式前方障礙物辨識系統,就是以攝影機為基礎的辨識方法,在車輛上實現即時運算偵測,可正確辨識行人、機腳踏車、車輛等多種障礙物,並藉由判斷移動物的快慢,精準掌握煞車的時機點,達到即時煞停的功能。此外,車用智慧影像感知融合平台亦是以攝影機為基礎,融合不同感測器的數據,使車輛具備多種生物感知能力,以及360 度無盲區主動偵測。
目前各個車廠的駕駛感知平台都是封閉環境,外界難以插手進行整合,連豊力特別強調,工研院的作法是將自動駕駛的技術成果整合於現有的電動車,以提供更好的自動控制與速度操控,為國內業者開發專屬的駕駛感知平台,希望藉此為臺灣業者拓展全新的應用模式與商機。
(本文經工業技術與資訊授權,轉載自308期「搶攻未來車用電子商機 自駕車智慧技術再進階」)
延伸閱讀:
三個螢幕資訊更多 抬頭顯示器再進化
牛仔好忙牛仔需要三眼怪

